
1. Fonksiyonên Omain
Servo Press amûrek e ku ji hêla motora zexîreyê ve bi rêgezê zextê ve tê veguheztin, kontrol dike û rê dide ku di heman demê de zexta xebatê ya ku di heman demê de derbas dike, da ku bigihîje armanca pêvajoyê. Ew dikare di her kêliyê de zexta / rawestandina / rawestandina rawestandinê / rawestandina rawestandinê / dema rawestandina leza rawestandinê bike, ew dikare fêm bike ku kontrola girtî ya tevahiya pêvajoya zextê li ser operasyona zextê û kûrahiyê di operasyona Meclîsa Pressapemeniyê de; Dîmendera touch bi navbeynkariya human-computer ya heval-intuitive û karanîna hêsan e. Ew bi perdeyek ronahiya ewlehiyê tête saz kirin. Ger destek di pêvajoya sazkirinê de bigihîje qada sazkirinê, indenter dê li Situ raweste da ku operasyona ewledar peyda bike.
Heke hewce ye ku mîhengên fonksiyonên din ên fonksiyonel zêde bike an jî parçeyên pargîdaniyên din diyar bikin, bihayê ji hev cuda were hesibandin. Carekê hilberîn qediya, dê tiştên ne vegere
2 Parametreyên teknîkî yên sereke
| Taybetmendiyên | HH-C-10kn |
| Çîna rastiya zextê | Asta 1 |
| Zexta herî zêde | 10kn |
| Rêza zextê | 50N-10KN |
| Resolution | 0.32 |
| Hejmara nimûneyan | 1000 caran per second |
| Stroke herî zêde | 150mm (Customizable) |
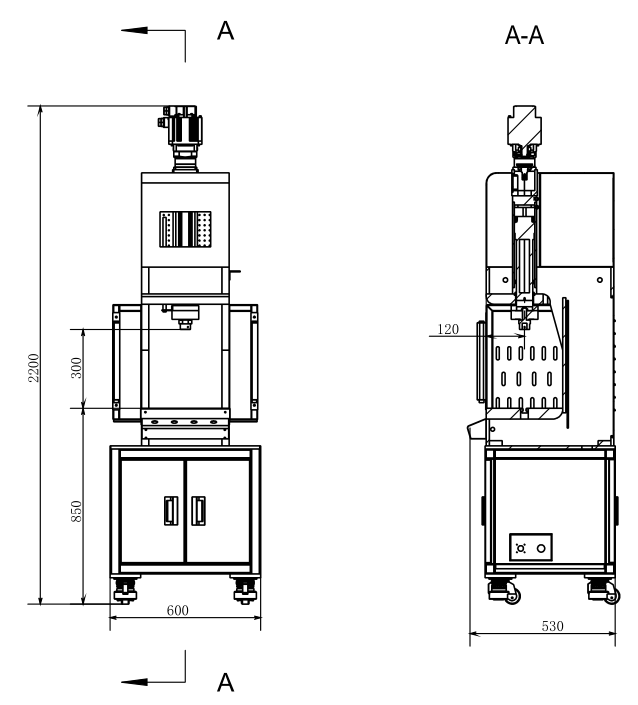
| Bilindahiya girtî | 300mm |
| Kûrahiya qirikê | 120mm |
| Resolution Veguheztinê | 0.001MM |
| Rastiya Ragihandinê | ± 0.01MM |
| Leza çapê | 0.01-35mm / s |
| No-leza barkirinê | 125mm / s |
| Leza herî kêm dikare were danîn | 0.01mm / s |
| Wexta girtin | 0.1-150s |
| Dema girtina zexta kêmtirîn dikare were danîn | 0.1S |
| Hêza Amûran | 750w |
| Voltaja peyda bikin | 220 V |
| Dîwana giştî | 530 × 600 × 2200mm |
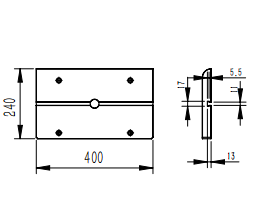
| Mezinahiya maseya xebatê | 400mm (çep û rast), 240mm (pêş û paş) |
| Giraniya ye | 350kg |
| Mezinahî û dizera hundurîn a hundurîn dimirin | Φ 20mm, 25 mm Deep |
3.outline Dimension Drawing
Dirêjbûnên groove t-shaped li ser kar
4.Makirina pergala pergalê
| Xwarinên lezok | Hêmanên sereke |
| 1 | Kontrola entegre ya ekranê touch |
| 2 | Sensora zextê |
| 3 | Pergala servo |
| 4 | Cilylerê Servoelectric |
| 5 | Grating ewlehî |
| 6 | Hilberîna Mode Mode |
5.Maina navgîniya nermalava pergalê

Navbera sereke bişkoja navbeynkariyê, dîmendera daneyê û fonksiyonên operasyona manual pêk tê.
Rêvebir: Di nav de paşpirtik, girtî û têketinê hilbijartina rêbaza navbeynê ya jump.
Mîhengên: tevî yekîneya navbeynê û mîhengên pergalê.
Zero: Daneyên nîşana barkirinê paqij bikin.
Dîtin: Hilbijartina navbeynkariya ziman û grafîkî.
Alîkarî: Agahdariya guhertoyê, mîhengê cîvaka domdar.
Plana Testê: Rêbaza Mountingapemeniyê ya çapê biguherînin.
Dabeşek red bikin: Daneyên danûstendina çapkirinê ya heyî paqij bikin.
Daneyên Export: Daneyên orjînal ên daneyên montajê yên heyî derxînin.
Serhêl: Destpêk bi bernameyê re danûstendinê saz dike.
Hêza: Monitoringavdêriya Hêza Time-Time.
Dabeşkirin: Helwesta rawestanê ya çapemeniya rastîn.
Hêza herî zêde: Hêza herî zêde di pêvajoya çapkirinê de hatî çêkirin.
Kontrolkirina Manual: Bişkojka domdar û asê, diherike, Zexta destpêkê ceribandin.
6. Taybetmendiyên Taybetmendiyê
1.high Rastiya alavên: Rastiya pozîsyona dubare ± 0.01mm, rastiya zextê 0.5% FS
2. Nermalava xwe-pêşkeftî û hêsan e.
3. Guhertoyên çapkirinê: Kontrola zexta vebijarkî û kontrola pozîsyonê.
4. Pergalê konteynirek entegre ya entegre ya ku dikare biguherîne û hilîne û hilîne û hilîne. Piştî ku zêdetirî 50 parçeyên daneyê têne hilanîn, dê daneya kevn bixweber were nivîsandin (Nîşe: Daneyên piştî têkçûna hêzê bixweber were paqij kirin). Alavên dikarin dîskek Flash-ê ya derveyî (di nav 8g, fa32 format) de bikin da ku daneyên dîrokî hilînin. Formata daneyê XX.XLSX e
5. Software fonksiyona zerfê heye, ku dikare li gorî daxwazan, sînorê hilberê hilberê an sînorê vebijarkî bicîh bike. Ger daneyên rast-ê di nav rêzê de nine, alav dê bixweber alarm bike.
6
7
8. Teknolojiya Rêveberiya Karê ya Meclîsa Serhêl dikare di wextê rastîn de hilberên kêmasiyê tespît bike.
9. Li gorî daxwazên hilberê taybetî, pêvajoya zexta çêtirîn diyar bikin.
10. Fonksiyonên tomarkirinê û analîzkirina pêvajoyê ya bêkêmasî, temam û rastîn.
11. Ew dikare rêveberiya alavên pir-armanc û berbiçav fêm bike.
12. Formatên Data, Excel, Peyv, Peyv, û daneyên bi hêsanî dikarin di SPC û Sîstemên Analysisên Data yên din de bêne şandin.
13. Xweser û têkçûna enerjiyê: Fonksiyona alavên servo, fonksiyona çapê ya servo, agahdariya çewtiyê û ji bo çareseriyê, ku hêsantir e ku pirsgirêk bibîne û çareser bike.
14. Navbera ragihandinê ya pir-fonksiyonel: Bi navgîniya vê navbeynê, danûstendina bi amûrên derveyî re were fêm kirin, ku ji bo yekbûna otomatîkî ya tevahî hêsan e.
15. Nermalav fonksiyonên mîhengên destûr, wek rêvebir, operator û destûrên din pêk tîne.
7. Zeviya serîlêdanê
1
2. Pressapemeniya rastîn a hilberên elektronîkî
3
4 Serîlêdana çapemeniya Pressapemeniyê ya Paqijkirina Moto
5. Detectionapkirina zexta rastîn wekî ceribandina performansa biharê
6. Serlêdana xeta otomatê ya otomatîkî
7. Serlêdana çapkirinê ya pêkhatên Aerospace Core
8. Meclîs û Meclîsa amûrên bijîjkî û elektrîkê
9
Demjimêra paşîn: Feb-22-2023